
L298
October 1998
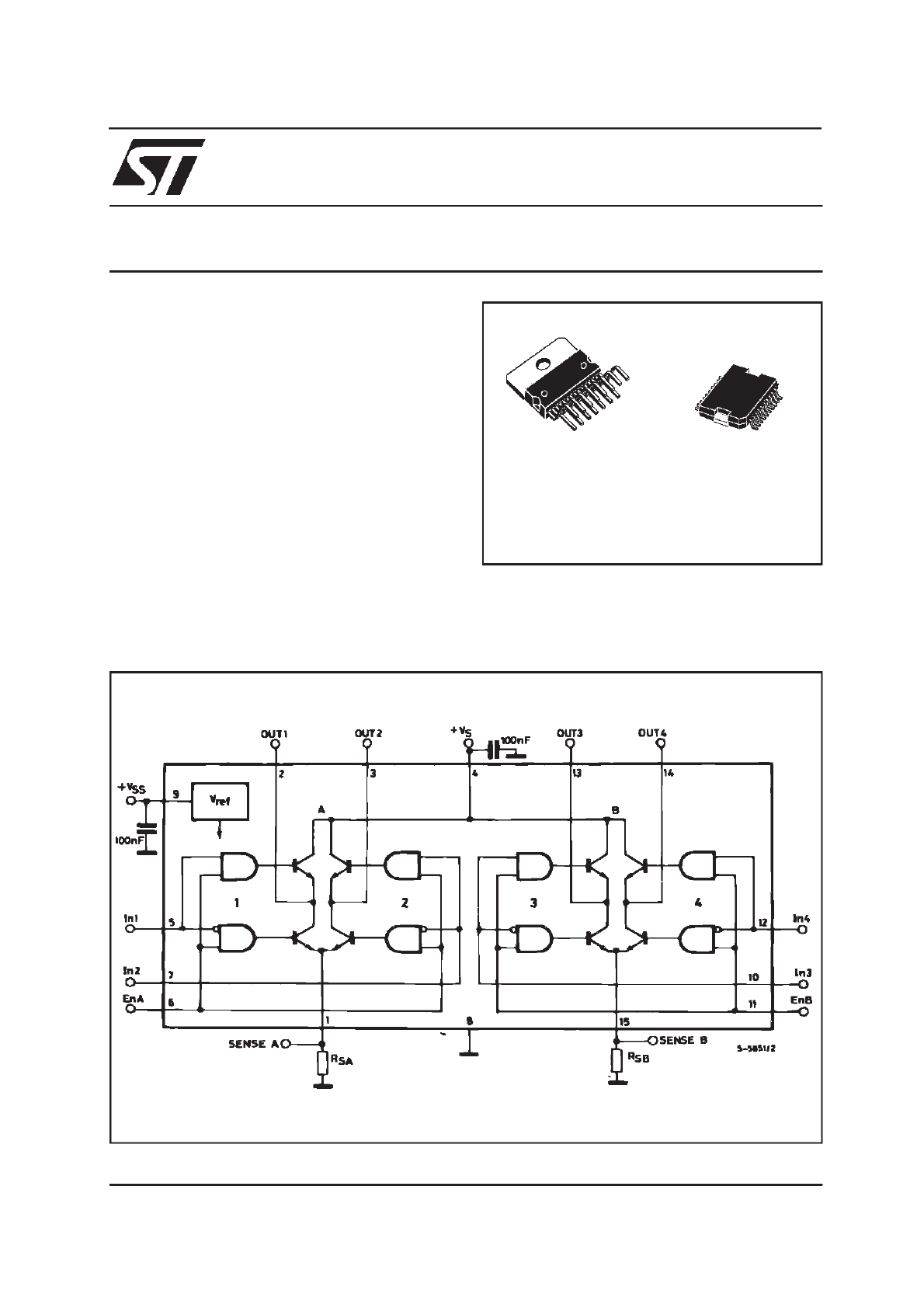
DUAL FULL-BRIDGE DRIVER
Multiw att15
O RDERING NUMBERS : L298N (Mult iwatt Vert. )
L298HN (Multiwatt Horiz. )
L298P (PowerSO20)
BLOCK DIAGRAM
.
OPERATING SUPPLY VOLTAGE UP TO 46 V
.
TOTAL DC CURRENT UP TO 4 A
.
LOW SATURATION VOLTAGE
.
OVERTEMPERATURE PROTECTION
.
LOGICAL ”0” INPUT VOLTAGE UP TO 1.5 V
(HIGH NOISE IMMUNITY)
DESCRIPTION
The L298 is an integrated monolithic circuit in a 15-
lead Multiwatt and PowerSO20 packages. It is a
high voltage, high current dual full-bridge driver de-
signed to accept standardTTL logic levels and drive
inductive loads such as relays, solenoids, DC and
stepping motors. Two enableinputs are provided to
enable or disable the deviceindependentlyof the in-
put signals. The emitters of the lower transistors of
each bridge are connected together and the corre-
sponding external terminal can be used for the con-
nectionof an externalsensing resistor. An additional
supply input is provided so that the logic works at a
lower voltage.
PowerSO20
1/13
PIN CONNECTIONS (top view)
GND
Input 2
VSS
N.C.
Out 1
V
S
Out 2
Input 1
Enable A
Sense A
GND
10
8
9
7
6
5
4
3
2
13
14
15
16
17
19
18
20
12
1
11
GND
D95IN239
Input 3
Enable B
Out 3
Input 4
Out 4
N.C.
Sense B
GND
ABSOLUTE MAXIMUM RATINGS
Symb ol
Parameter
Value
Uni t
V
S
Power Supply
50
V
V
SS
Logic Supply Voltage
7
V
V
I
,V
en
Input and Enable Voltage
–0.3 to 7
V
I
O
Peak Output Current (each Channel)
– Non Repetitive (t = 100
µ
s)
–Repetitive (80% on –20% off; t
on
= 10ms)
–DC Operation
3
2.5
2
A
A
A
V
sens
Sensing Voltage
–1 to 2.3
V
P
tot
Total Power Dissipation (T
case
= 75
°
C)
25
W
T
op
Junction Operating Temperature
–25 to 130
°
C
T
stg
, T
j
Storage and Junction Temperature
–40 to 150
°
C
THERMAL DATA
Symb ol
Parameter
Po werSO20
Mu ltiwatt15
Uni t
R
th j-case
Thermal Resistance Junction-case
Max.
–
3
°
C/W
R
th j-amb
Thermal Resistance Junction-ambient
Max.
13 (*)
35
°
C/W
(*) Mounted on aluminum substrate
1
2
3
4
5
6
7
9
10
11
8
ENABLE B
INPUT 3
LOGIC SUPPLY VOLTAGE V
SS
GND
INPUT 1
ENABLE A
INPUT 1
SUPPLY VOLTAGE V
S
OUTPUT 2
OUTPUT 1
CURRENT SENSING A
TAB CONNECTED TO PIN 8
13
14
15
12
CURRENT SENSING B
OUTPUT 4
OUTPUT 3
INPUT 4
D95IN240
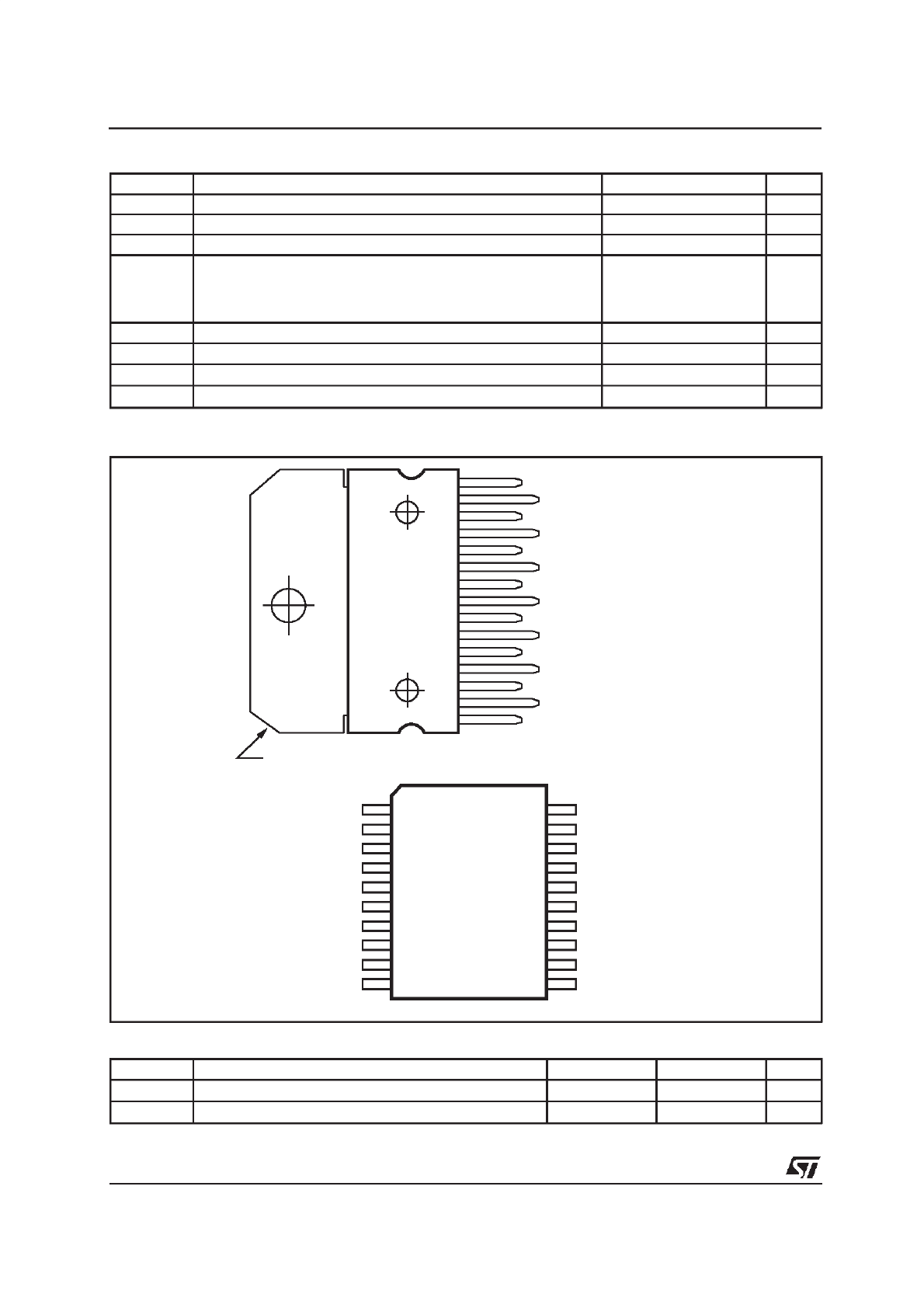
Multiwatt15
PowerSO20
L298
2/13
PIN FUNCTIONS (refer to the block diagram)
MW. 15
Po werSO
Name
Fun ction
1;15
2;19
Sense A; Sense B
Between this pin and ground is connected the sense resistor to
control the current of the load.
2;3
4;5
Out 1; Out 2
Outputs of the Bridge A; the current that flows through the load
connected between these two pins is monitored at pin 1.
4
6
V
S
Supply Voltage for the Power Output Stages.
A non-inductive 100nF capacitor must be connected between this
pin and ground.
5;7
7;9
Input 1; Input 2
TTL Compatible Inputs of the Bridge A.
6;11
8;14
Enable A; Enable B
TTL Compatible Enable Input: the L state disables the bridge A
(enable A) and/or the bridge B (enable B).
8
1,10,11,20
GND
Ground.
9
12
VSS
Supply Voltage for the Logic Blocks. A100nF capacitor must be
connected between this pin and ground.
10; 12
13;15
Input 3; Input 4
TTL Compatible Inputs of the Bridge B.
13; 14
16;17
Out 3; Out 4
Outputs of the Bridge B. The current that flows through the load
connected between these two pins is monitored at pin 15.
–
3;18
N.C.
Not Connected
ELECTRICAL CHARACTERISTICS (V
S
= 42V; V
SS
= 5V, T
j
= 25
°
C; unless otherwise specified)
Symbol
Parameter
Test Co ndi tions
Min .
Typ .
Max.
Uni t
V
S
Supply Voltage (pin 4)
Operative Condition
V
IH
+2.5
46
V
V
SS
Logic Supply Voltage (pin 9)
4.5
5
7
V
I
S
Quiescent Supply Current (pin 4)
V
en
= H; I
L
= 0
V
i
= L
V
i
= H
13
50
22
70
mA
mA
V
en
= L
V
i
= X
4
mA
I
SS
Quiescent Current from V
SS
(pin 9) V
en
= H; I
L
= 0
V
i
= L
V
i
= H
24
7
36
12
mA
mA
V
en
= L
V
i
= X
6
mA
V
iL
Input Low Voltage
(pins 5, 7, 10, 12)
–0.3
1.5
V
V
iH
Input High Voltage
(pins 5, 7, 10, 12)
2.3
VSS
V
I
iL
Low Voltage Input Current
(pins 5, 7, 10, 12)
V
i
= L
–10
µ
A
I
iH
High Voltage Input Current
(pins 5, 7, 10, 12)
Vi = H
≤
V
SS
–0.6V
30
100
µ
A
V
en
= L
Enable Low Voltage (pins 6, 11)
–0.3
1.5
V
V
en
= H
Enable High Voltage (pins 6, 11)
2.3
V
SS
V
I
en
= L
Low Voltage Enable Current
(pins 6, 11)
V
en
= L
–10
µ
A
I
en
= H
High Voltage Enable Current
(pins 6, 11)
V
en
= H
≤
V
SS
–0.6V
30
100
µ
A
V
CEsat (H)
Source Saturation Voltage
I
L
= 1A
I
L
= 2A
0.95
1.35
2
1.7
2.7
V
V
V
CEsat (L)
Sink Saturation Voltage
I
L
= 1A
(5)
I
L
= 2A
(5)
0.85
1.2
1.7
1.6
2.3
V
V
V
CEsat
Total Drop
I
L
= 1A
(5)
I
L
= 2A
(5)
1.80
3.2
4.9
V
V
V
sens
Sensing Voltage (pins 1, 15)
–1 (1)
2
V
L298
3/13
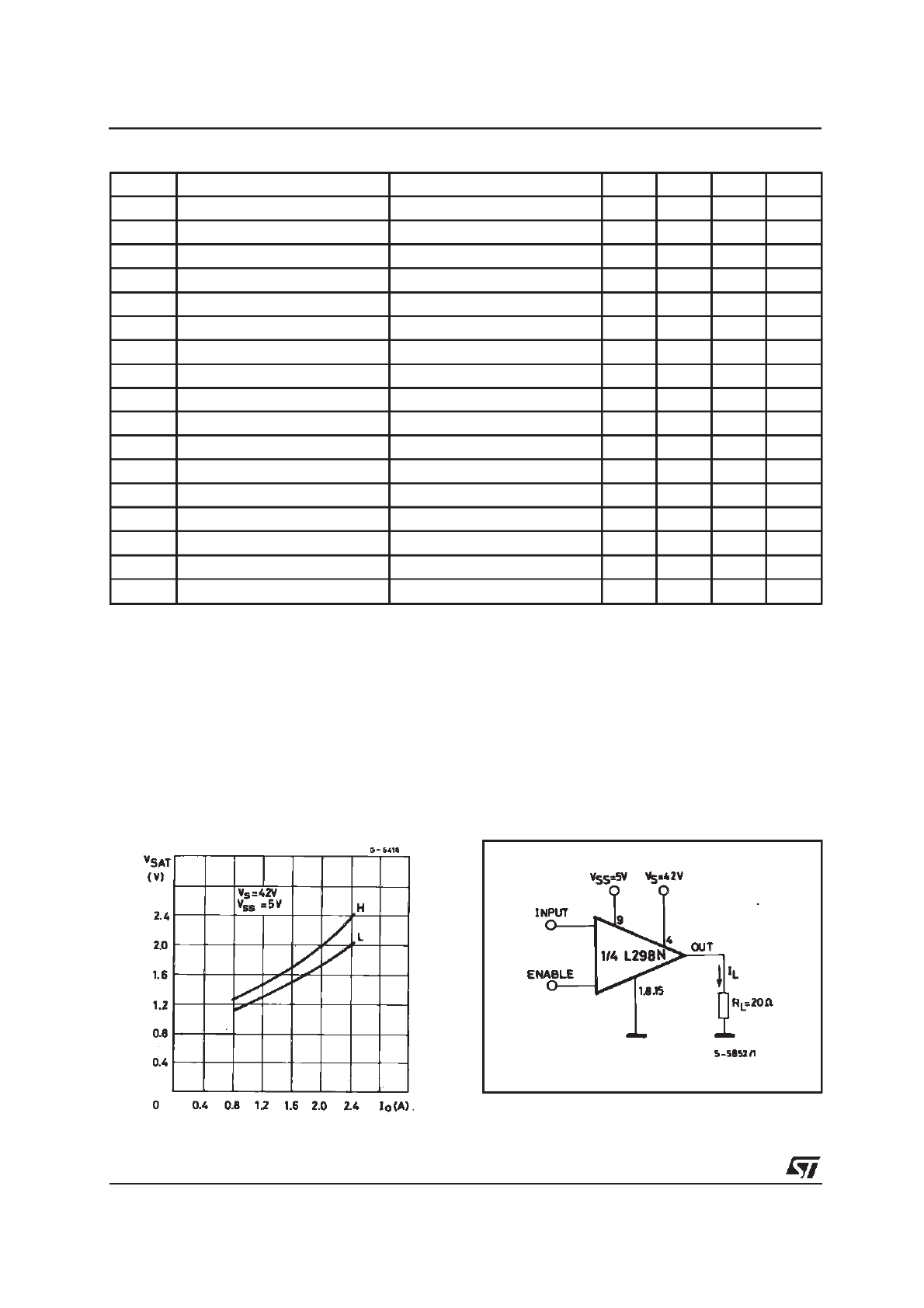
Figure 1 : Typical Saturation Voltage vs. Output
Current.
Figure 2 : Switching Times Test Circuits.
Note : For INPUT Switching, set EN = H
For ENABLESwitching, set IN = H
1) 1)Sensing voltage can be –1 V for t
≤
50
µ
sec; in steady state V
sens
min
≥
– 0.5 V.
2) See fig. 2.
3) See fig. 4.
4) The load must be a pure resistor.
ELECTRICAL CHARACTERISTICS (continued)
Symbol
Parameter
Test Co ndi tions
Min .
Typ .
Max.
Uni t
T
1
(V
i
)
Source Current Turn-off Delay
0.5 V
i
to 0.9 I
L
(2); (4)
1.5
µ
s
T
2
(V
i
)
Source Current Fall Time
0.9 I
L
to 0.1 I
L
(2); (4)
0.2
µ
s
T
3
(V
i
)
Source Current Turn-on Delay
0.5 V
i
to 0.1 I
L
(2); (4)
2
µ
s
T
4
(V
i
)
Source Current Rise Time
0.1 I
L
to 0.9 I
L
(2); (4)
0.7
µ
s
T
5
(V
i
)
Sink Current Turn-off Delay
0.5 V
i
to 0.9 I
L
(3); (4)
0.7
µ
s
T
6
(V
i
)
Sink Current Fall Time
0.9 I
L
to 0.1 I
L
(3); (4)
0.25
µ
s
T
7
(V
i
)
Sink Current Turn-on Delay
0.5 V
i
to 0.9 I
L
(3); (4)
1.6
µ
s
T
8
(V
i
)
Sink Current Rise Time
0.1 I
L
to 0.9 I
L
(3); (4)
0.2
µ
s
fc (V
i
)
Commutation Frequency
I
L
= 2A
25
40
KHz
T
1
(V
en
)
Source Current Turn-off Delay
0.5 V
en
to 0.9 I
L
(2); (4)
3
µ
s
T
2
(V
en
)
Source Current Fall Time
0.9 I
L
to 0.1 I
L
(2); (4)
1
µ
s
T
3
(V
en
)
Source Current Turn-on Delay
0.5 V
en
to 0.1 I
L
(2); (4)
0.3
µ
s
T
4
(V
en
)
Source Current Rise Time
0.1 I
L
to 0.9 I
L
(2); (4)
0.4
µ
s
T
5
(V
en
)
Sink Current Turn-off Delay
0.5 V
en
to 0.9 I
L
(3); (4)
2.2
µ
s
T
6
(V
en
)
Sink Current Fall Time
0.9 I
L
to 0.1 I
L
(3); (4)
0.35
µ
s
T
7
(V
en
)
Sink Current Turn-on Delay
0.5 V
en
to 0.9 I
L
(3); (4)
0.25
µ
s
T
8
(V
en
)
Sink Current Rise Time
0.1 I
L
to 0.9 I
L
(3); (4)
0.1
µ
s
L298
4/13
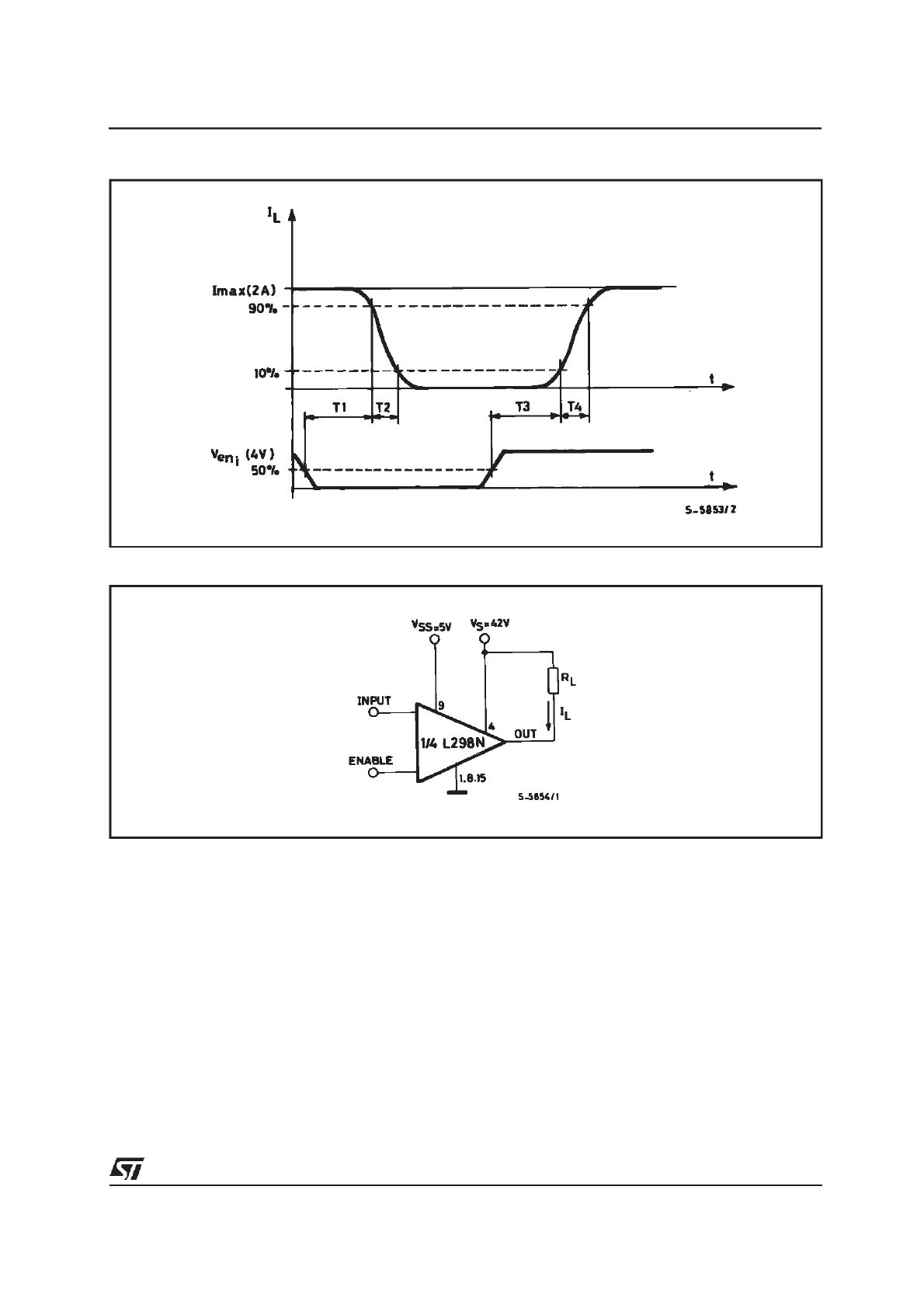
Figure 3 : Source Current Delay Times vs. Input or Enable Switching.
Figure 4 : Switching Times Test Circuits.
Note : For INPUT Switching, set EN = H
For ENABLE Switching, set IN = L
L298
5/13
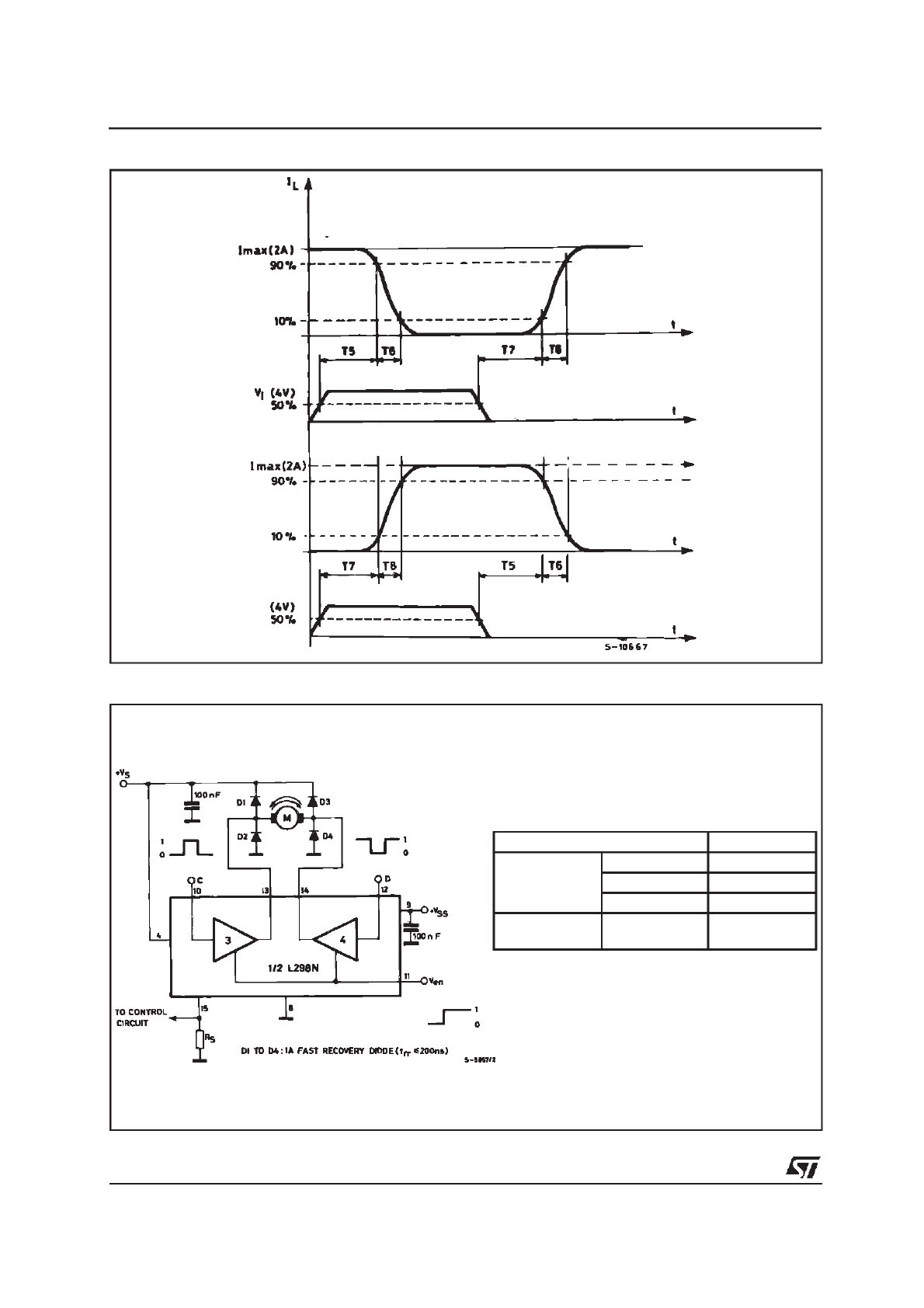
Figure 5 : Sink Current Delay Times vs. Input 0 V Enable Switching.
Figure 6 : Bidirectional DC Motor Control.
L = Low
H = High
X = Don’t care
In pu ts
Fu nctio n
V
en
= H
C = H ; D = L
Turn Right
C = H ; D = H
Turn Left
C = D
Fast Motor Stop
V
en
= L
C = X ; D = C
Free Running
Motor Stop
L298
6/13
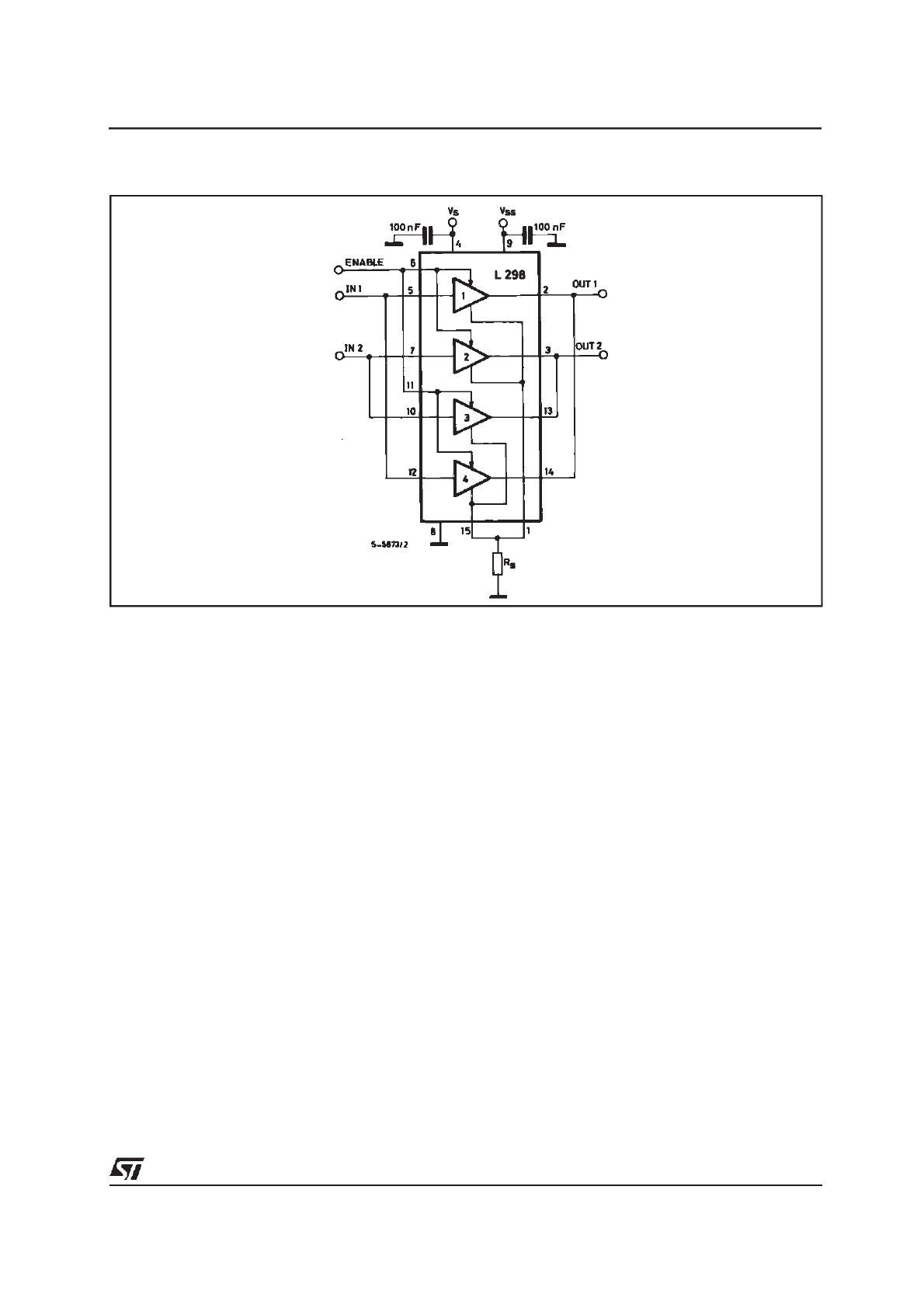
Figure 7 : For higher currents, outputs can be paralleled. Take care to parallel channel 1 with channel 4
and channel 2 with channel 3.
APPLICATION INFORMATION (Refer to the block diagram)
1.1. POWER OUTPUT STAGE
The L298 integratestwo poweroutputstages(A ; B).
The power output stage is a bridge configuration
and its outputs can drive an inductive load in com-
mon or differenzial mode, dependingon the state of
the inputs. The current that flows through the load
comes out from the bridge at the sense output : an
external resistor (R
SA
; R
SB
.) allows to detect the in-
tensity of this current.
1.2. INPUT STAGE
Each bridge is driven by means of four gates the in-
put of which are In1 ; In2 ; EnA and In3 ; In4 ; EnB.
The In inputs set the bridge state when The En input
is high ; a lowstate of the En input inhibitsthe bridge.
All the inputs are TTL compatible.
2. SUGGESTIONS
A non inductive capacitor, usually of 100 nF, must
be foreseen between both Vs and Vss, to ground,
as near as possible to GND pin. When the large ca-
pacitor of the power supply is too far from the IC, a
second smaller one must be foreseen near the
L298.
The sense resistor, not of a wire wound type, must
be grounded near the negative pole of Vs that must
be near the GND pin of the I.C.
Each input must be connected to the source of the
driving signals by means of a very short path.
Turn-On and Turn-Off : Before to Turn-ON the Sup-
ply Voltageand beforeto Turnit OFF, the Enablein-
put must be driven to the Low state.
3. APPLICATIONS
Fig 6 shows a bidirectional DC motor control Sche-
matic Diagram for which only one bridge is needed.
The external bridge of diodes D1 to D4 is made by
four fast recovery elements (trr
≤
200 nsec) that
must be chosen of a VF as low as possible at the
worst case of the load current.
The sense output voltage can be used to control the
current amplitude by chopping the inputs, or to pro-
vide overcurrent protection by switching low the en-
able input.
The brake function (Fast motor stop) requires that
the Absolute Maximum Rating of 2 Amps must
never be overcome.
When the repetitive peak current needed from the
load is higher than 2 Amps, a paralleled configura-
tion can be chosen (See Fig.7).
An external bridge of diodes are required when in-
ductive loads are driven and when the inputs of the
IC are chopped; Shottkydiodeswould be preferred.
L298
7/13
This solution can drive until 3 Amps In DC operation
and until 3.5 Amps of a repetitive peak current.
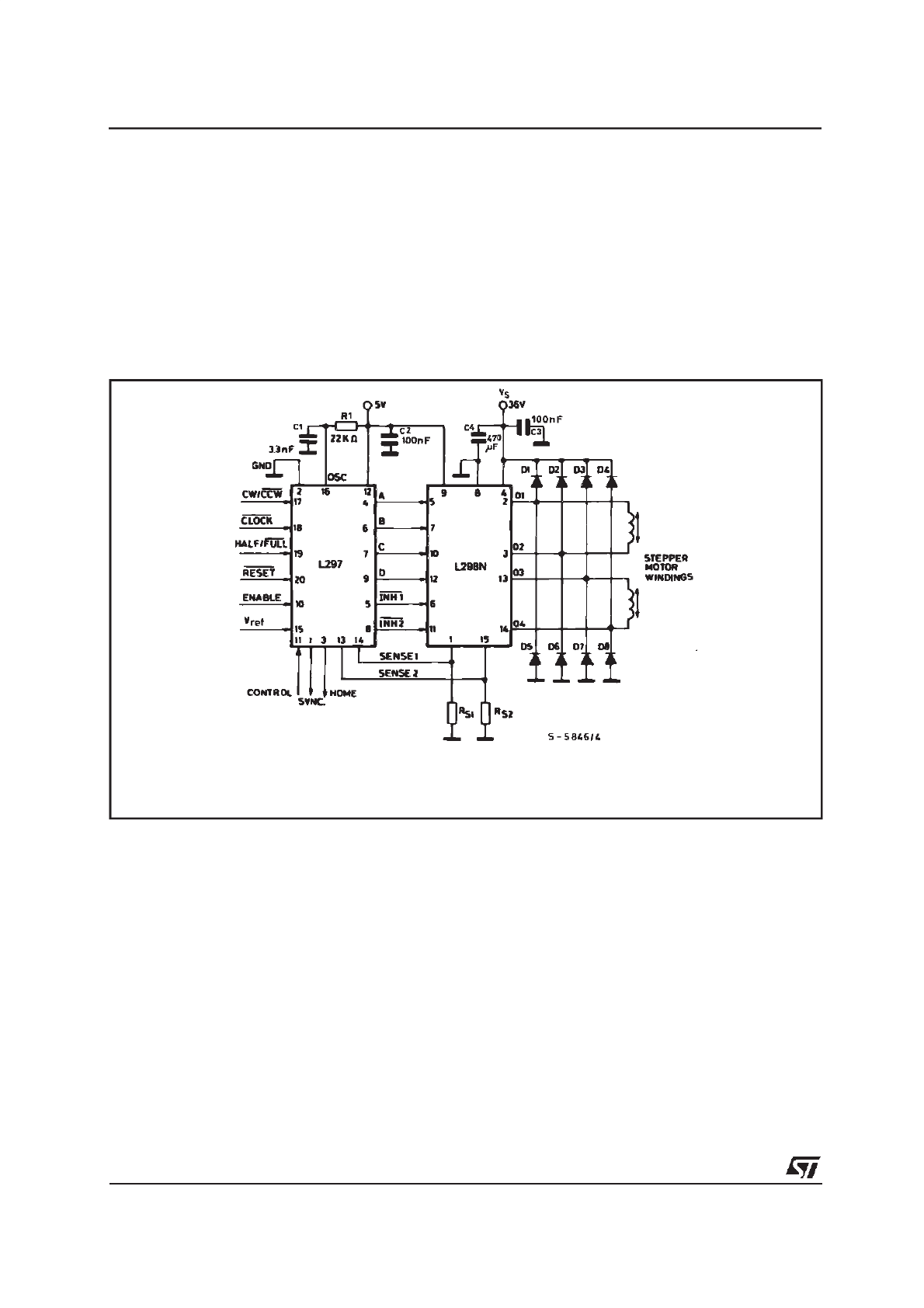
OnFig 8 it is shownthe driving of a twophasebipolar
stepper motor ; the needed signals to drive the in-
puts of the L298 are generated, in this example,
from the IC L297.
Fig 9 shows an example of P.C.B. designed for the
application of Fig 8.
Fig 10 shows a second two phase bipolar stepper
motor control circuit where the current is controlled
by the I.C. L6506.
Figure 8 : Two Phase Bipolar Stepper Motor Circuit.
This circuit drives bipolar stepper motors with winding currents up to 2 A. The diodes are fast 2 A types.
R
S1
= R
S2
= 0.5
Ω
D1 to D8 = 2 A Fast diodes
{
V
F
≤
1.2 V @ I = 2 A
trr
≤
200 ns
L298
8/13
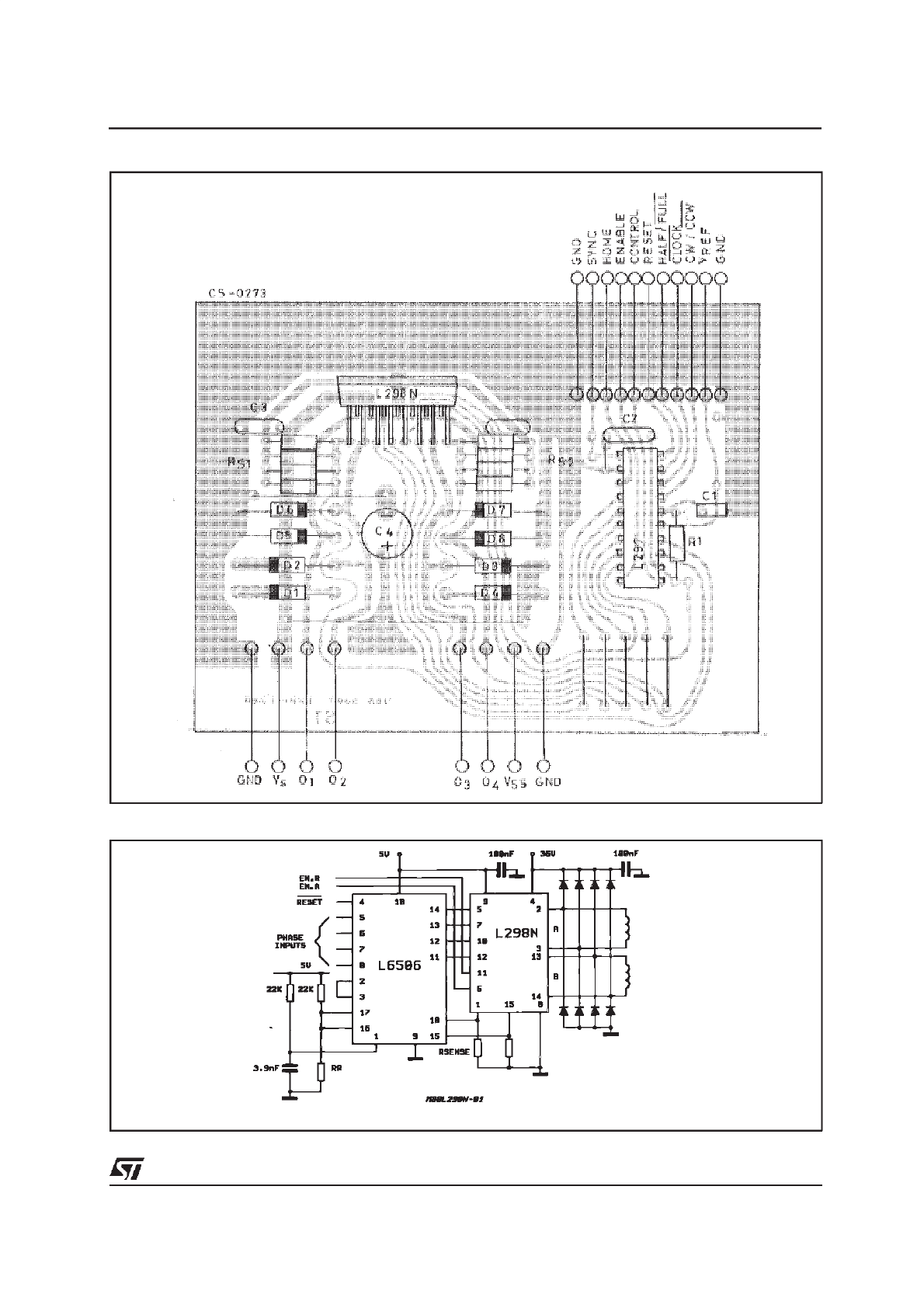
Figure 9 : Suggested Printed Circuit Board Layout for the Circuit of fig. 8 (1:1 scale).
Figure 10 : Two Phase Bipolar Stepper Motor Control Circuit by Using the Current Controller L6506.
R
R
and R
sense
depend from the load current
L298
9/13
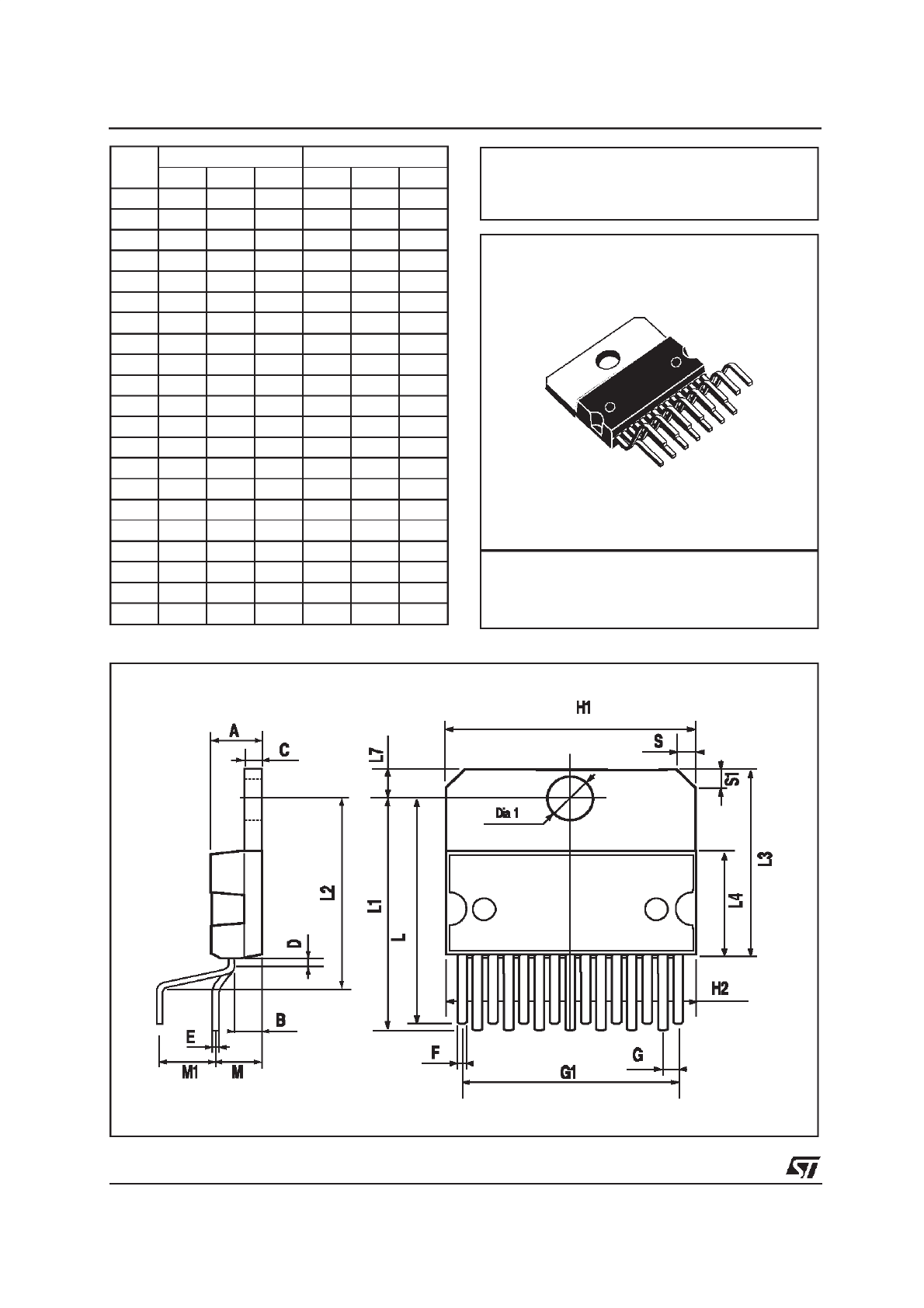
Multiwatt15 V
DIM.
mm
inch
MIN.
TYP.
MAX.
MIN.
TYP.
MAX.
A
5
0.197
B
2.65
0.104
C
1.6
0.063
D
1
0.039
E
0.49
0.55
0.019
0.022
F
0.66
0.75
0.026
0.030
G
1.02
1.27
1.52
0.040
0.050
0.060
G1
17.53
17.78
18.03
0.690
0.700
0.710
H1
19.6
0.772
H2
20.2
0.795
L
21.9
22.2
22.5
0.862
0.874
0.886
L1
21.7
22.1
22.5
0.854
0.870
0.886
L2
17.65
18.1
0.695
0.713
L3
17.25
17.5
17.75
0.679
0.689
0.699
L4
10.3
10.7
10.9
0.406
0.421
0.429
L7
2.65
2.9
0.104
0.114
M
4.25
4.55
4.85
0.167
0.179
0.191
M1
4.63
5.08
5.53
0.182
0.200
0.218
S
1.9
2.6
0.075
0.102
S1
1.9
2.6
0.075
0.102
Dia1
3.65
3.85
0.144
0.152
OUTLINE AND
MECHANICAL DATA
L298
10/13
DIM.
mm
inch
MIN.
TYP.
MAX.
MIN.
TYP.
MAX.
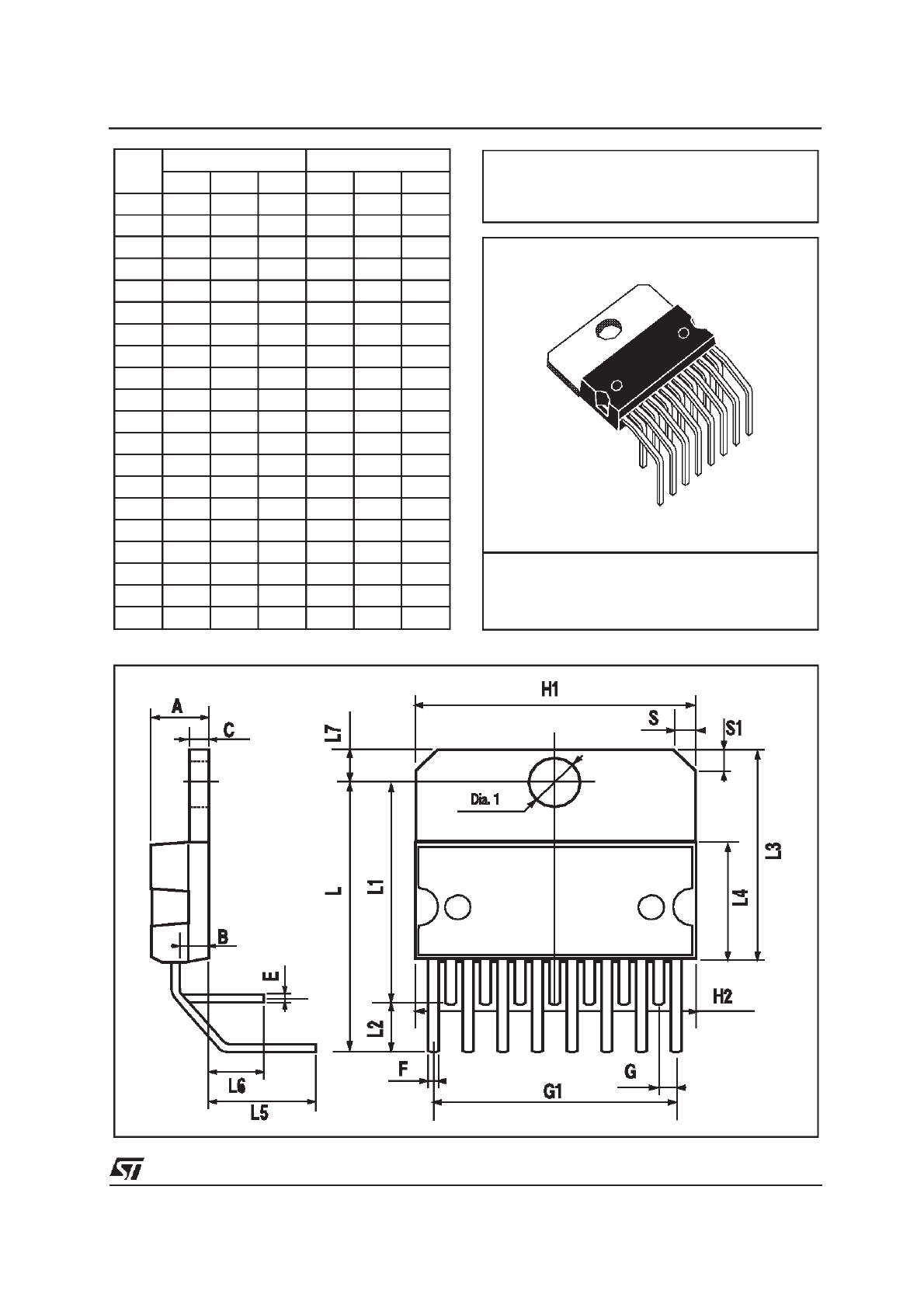
A
5
0.197
B
2.65
0.104
C
1.6
0.063
E
0.49
0.55
0.019
0.022
F
0.66
0.75
0.026
0.030
G
1.14
1.27
1.4
0.045
0.050
0.055
G1
17.57
17.78
17.91
0.692
0.700
0.705
H1
19.6
0.772
H2
20.2
0.795
L
20.57
0.810
L1
18.03
0.710
L2
2.54
0.100
L3
17.25
17.5
17.75
0.679
0.689
0.699
L4
10.3
10.7
10.9
0.406
0.421
0.429
L5
5.28
0.208
L6
2.38
0.094
L7
2.65
2.9
0.104
0.114
S
1.9
2.6
0.075
0.102
S1
1.9
2.6
0.075
0.102
Dia1
3.65
3.85
0.144
0.152
Multiwatt15 H
OUTLINE AND
MECHANICAL DATA
L298
11/13
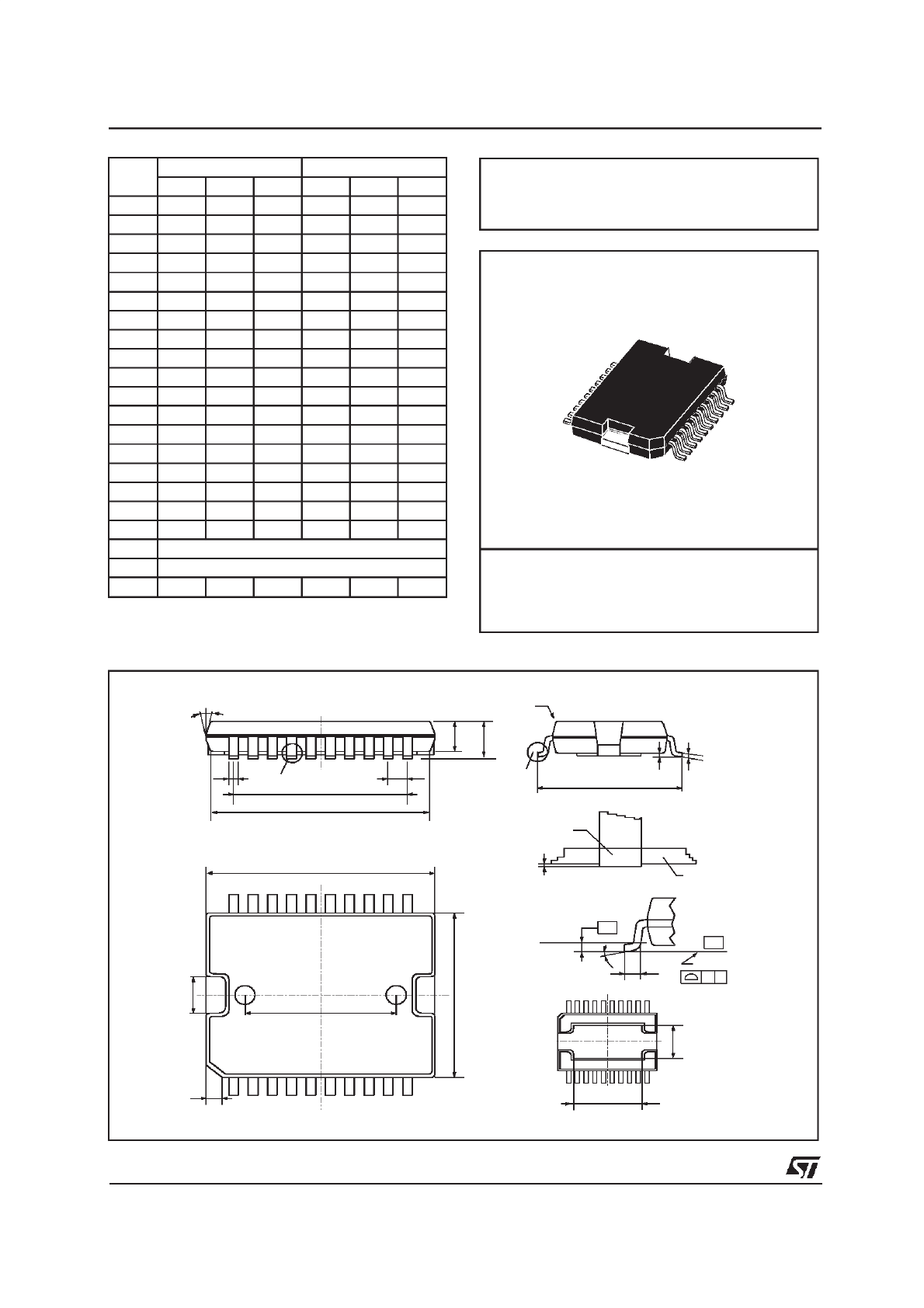
JEDEC MO-166
PowerSO20
e
a2
A
E
a1
PSO20MEC
DETAIL A
T
D
1
11
20
E1
E2
h x 45
DETAIL A
lead
slug
a3
S
Gage Plane
0.35
L
DETAIL B
R
DETAIL B
(COPLANARITY)
G
C
- C -
SEATING PLANE
e3
b
c
N
N
H
BOTTOM VIEW
E3
D1
DIM.
mm
inch
MIN.
TYP.
MAX.
MIN.
TYP.
MAX.
A
3.6
0.142
a1
0.1
0.3
0.004
0.012
a2
3.3
0.130
a3
0
0.1
0.000
0.004
b
0.4
0.53
0.016
0.021
c
0.23
0.32
0.009
0.013
D (1)
15.8
16
0.622
0.630
D1
9.4
9.8
0.370
0.386
E
13.9
14.5
0.547
0.570
e
1.27
0.050
e3
11.43
0.450
E1 (1)
10.9
11.1
0.429
0.437
E2
2.9
0.114
E3
5.8
6.2
0.228
0.244
G
0
0.1
0.000
0.004
H
15.5
15.9
0.610
0.626
h
1.1
0.043
L
0.8
1.1
0.031
0.043
N
10
°
(max.)
S
T
10
0.394
(1) ”D and F” do not include mold flash or protrusions.
- Mold flash or protrusions shall not exceed 0.15 mm (0.006”).
- Critical dimensions: ”E”, ”G” and ”a3”
OUTLINE AND
MECHANICAL DATA
8
°
(max.)
10
L298
12/13

Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the conse-
quences of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No
license is granted by implication or otherwise under any patent or patent rights of STMicroelectronics. Specification mentioned in this
publication are subject to change without notice. This publication supersedes and replaces all information previously supplied. STMi-
croelectronics products are not authorized for use as critical components in life support devices or systems without express written
approval of STMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics
1998 STMicroelectronics – Printed in Italy – All Rights Reserved
STMicroelectronics GROUP OF COMPANIES
Australia - Brazil - Canada - China - France - Germany - Italy - Japan - Korea - Malaysia - Malta - Mexico - Morocco - The Netherlands -
Singapore - Spain - Sweden - Switzerland - Taiwan - Thailand - United Kingdom - U.S.A.
http://www.st.com
L298
13/13